www.huvitera.ee/arduino-10A
//NR1 - Swift Register
// URL: https://docs.arduino.cc/tutorials/communication/guide-to-shift-out/
//**************************************************************//
// Name : shiftOutCode, Hello World
// Author : Carlyn Maw,Tom Igoe, David A. Mellis
// Date : 25 Oct, 2006
// Modified: 23 Mar 2010
// Version : 2.0
// Notes : Code for using a 74HC595 Shift Register //
// : to count from 0 to 255
//****************************************************************
//Pin connected to ST_CP of 74HC595
int latchPin = 8;
//Pin connected to SH_CP of 74HC595
int clockPin = 12;
////Pin connected to DS of 74HC595
int dataPin = 11;
void setup() {
//set pins to output so you can control the shift register
pinMode(latchPin, OUTPUT);
pinMode(clockPin, OUTPUT);
pinMode(dataPin, OUTPUT);
}
void loop() {
// count from 0 to 255 and display the number
// on the LEDs
for (int numberToDisplay = 0; numberToDisplay < 256; numberToDisplay++) {
// take the latchPin low so
// the LEDs don't change while you're sending in bits:
digitalWrite(latchPin, LOW);
// shift out the bits:
shiftOut(dataPin, clockPin, MSBFIRST, numberToDisplay);
//take the latch pin high so the LEDs will light up:
digitalWrite(latchPin, HIGH);
// pause before next value:
delay(500);
}
}
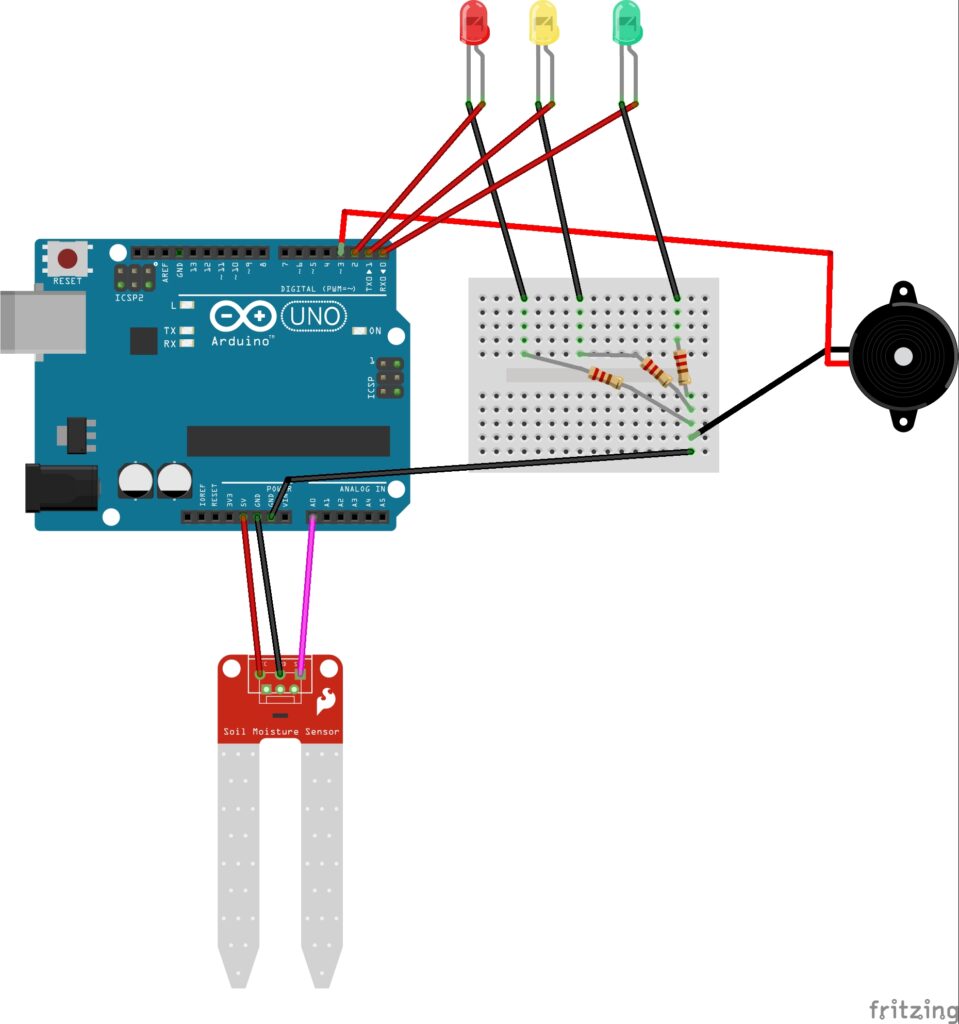
//NR2-mulla niiskus
int greenLight = 8; //Defining pins
int yellowLight = 9;
int redLight = 10;
int piezoBuzzer = 11;
int maximumMoistureLevel; //The max moisture level and current moisture levels will be needed for percentage calculations
int currentMoistureLevel;//Like so: current/max*100 = Moisture level as a percentage
void moistureDetection(){ //Create a function for all the long code, to keep the loop free
if(currentMoistureLevel/maximumMoistureLevel <= 0.1){ //If the moisture is below 10%
digitalWrite(greenLight, LOW);
digitalWrite(yellowLight, LOW);
digitalWrite(redLight, HIGH); //Switch on red light, and sound the buzzer
tone(piezoBuzzer, 5000, 500);
delay(2000);
}else if (currentMoistureLevel/maximumMoistureLevel <= 0.3 && currentMoistureLevel/maximumMoistureLevel > 0.1)
{//if the moisture level is in between 10 and 30%
digitalWrite(greenLight, LOW);
digitalWrite(yellowLight, LOW);
digitalWrite(redLight, HIGH); //Switch red light on, but don't sound the buzzer
}else if (currentMoistureLevel/maximumMoistureLevel <= 0.6 && currentMoistureLevel/maximumMoistureLevel > 0.3)
{//if the moisture level is in between 30 and 60%
digitalWrite(greenLight, LOW);
digitalWrite(yellowLight, HIGH);//Just switch yellow light on
digitalWrite(redLight, LOW);
} else //Otherwise the moisture level is above 60%, and therefore it's good enough
{
digitalWrite(greenLight, HIGH);//Switch green light on
digitalWrite(yellowLight, LOW);
digitalWrite(redLight, LOW);
}
}
void setup() {
for (int i = 0; i < 4; i++)//Use a for loop, to not have to initiate all the pins by hand
{
pinMode(i, OUTPUT);
}
pinMode (A0, INPUT); //A0 is the pin used for the Soil Moisture Sensor
maximumMoistureLevel = analogRead(A0);
tone(piezoBuzzer, 5000, 500);
delay(200);
tone(piezoBuzzer, 6000, 500);//Make a sound to show that the program has been initiated.
delay(600);
Serial.begin(9600);
}
void loop() {
currentMoistureLevel = analogRead(A0); //Keep renewing the readings for the current moisture level
moistureDetection();
delay(100); //Short delay to not overload the program
Serial.println(currentMoistureLevel);//Just so you can see the moisture level as a reading between 0-1023
}
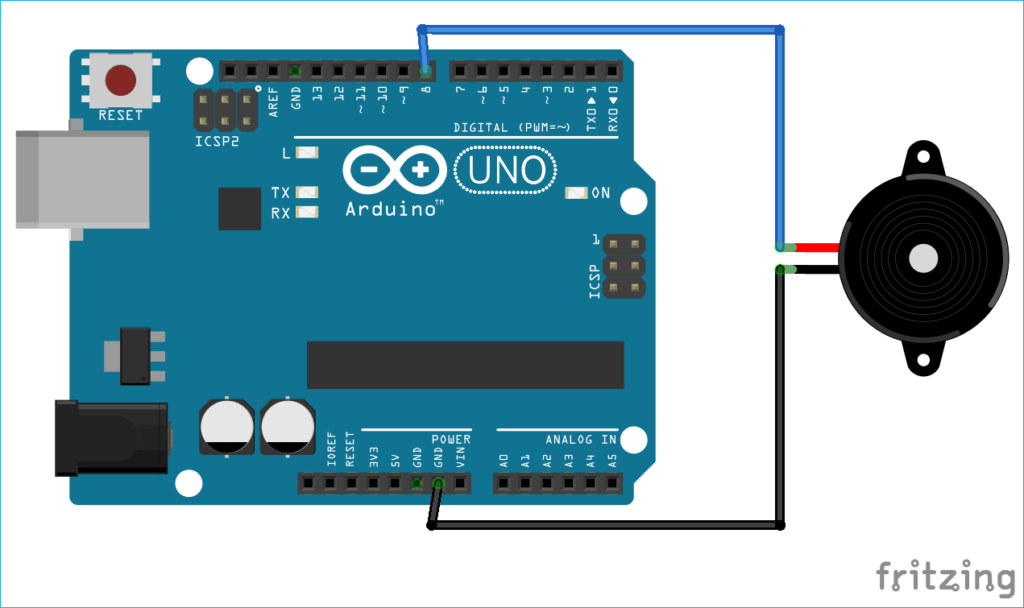
char stringToMorseCode[] = "";
int audio8 = 8; // output audio on pin 8
int note = 1200; // music note/pitch
int dotLen = 100; // length of the morse code 'dot'
int dashLen = dotLen * 3; // length of the morse code 'dash'
void setup() {
Serial.begin(9600);
}
void loop()
{
char inChar = 0;
char inData[100] = ""; // data length of 6 characters
String variable = "";
String variable1 = "";
int index1 = 0;
if ( Serial.available() > 0 ) { // Read from Rx from atmega16
while (Serial.available() > 0 && index1 < 100) // read till 6th character
{
delay(100);
inChar = Serial.read(); // start reading serilly and save to variable
inData[index1] = inChar;
index1++;
inData[index1] = '\0'; // Add a null at the end
}
variable.toUpperCase(); // convert to uppercase
for (byte i = 0 ; i < 100 ; i++) {
variable.concat(String(inData[i])); // concat strings
}
delay(20);
}
String stringToMorseCode = String(variable);
for (int i = 0; i < sizeof(stringToMorseCode) - 1; i++)
{
char tmpChar = stringToMorseCode[i];
tmpChar = toLowerCase(tmpChar);
GetChar(tmpChar);
}
}
void MorseDot()
{
tone(audio8, note, dotLen); // start playing a tone
delay(dotLen); // hold in this position
}
void MorseDash()
{
tone(audio8, note, dashLen); // start playing a tone
delay(dashLen); // hold in this position
}
void GetChar(char tmpChar)
{
switch (tmpChar) {
case 'a':
MorseDot();
delay(100);
MorseDash();
delay(100);
break;
case 'b':
MorseDash();
delay(100);
MorseDot();
delay(100);
MorseDot();
delay(100);
MorseDot();
delay(100);
break;
case 'c':
MorseDash();
delay(100);
MorseDot();
delay(100);
MorseDash();
delay(100);
MorseDot();
delay(100);
break;
case 'd':
MorseDash();
delay(100);
MorseDot();
delay(100);
MorseDot();
delay(100);
break;
case 'e':
MorseDot();
delay(100);
break;
case 'f':
MorseDot();
delay(100);
MorseDot();
delay(100);
MorseDash();
delay(100);
MorseDot();
delay(100);
break;
case 'g':
MorseDash();
delay(100);
MorseDash();
delay(100);
MorseDot();
delay(100);
break;
case 'h':
MorseDot();
delay(100);
MorseDot();
delay(100);
MorseDot();
delay(100);
MorseDot();
delay(100);
break;
case 'i':
MorseDot();
delay(100);
MorseDot();
delay(100);
break;
case 'j':
MorseDot();
delay(100);
MorseDash();
delay(100);
MorseDash();
delay(100);
MorseDash();
delay(100);
break;
case 'k':
MorseDash();
delay(100);
MorseDot();
delay(100);
MorseDash();
delay(100);
break;
case 'l':
MorseDot();
delay(100);
MorseDash();
delay(100);
MorseDot();
delay(100);
MorseDot();
delay(100);
break;
case 'm':
MorseDash();
delay(100);
MorseDash();
delay(100);
break;
case 'n':
MorseDash();
delay(100);
MorseDot();
delay(100);
break;
case 'o':
MorseDash();
delay(100);
MorseDash();
delay(100);
MorseDash();
delay(100);
break;
case 'p':
MorseDot();
delay(100);
MorseDash();
delay(100);
MorseDash();
delay(100);
MorseDot();
delay(100);
break;
case 'q':
MorseDash();
delay(100);
MorseDash();
delay(100);
MorseDot();
delay(100);
MorseDash();
delay(100);
break;
case 'r':
MorseDot();
delay(100);
MorseDash();
delay(100);
MorseDot();
delay(100);
break;
case 's':
MorseDot();
delay(100);
MorseDot();
delay(100);
MorseDot();
delay(100);
break;
case 't':
MorseDash();
delay(100);
break;
case 'u':
MorseDot();
delay(100);
MorseDot();
delay(100);
MorseDash();
delay(100);
break;
case 'v':
MorseDot();
delay(100);
MorseDot();
delay(100);
MorseDot();
delay(100);
MorseDash();
delay(100);
break;
case 'w':
MorseDot();
delay(100);
MorseDash();
delay(100);
MorseDash();
delay(100);
break;
case 'x':
MorseDash();
delay(100);
MorseDot();
delay(100);
MorseDot();
delay(100);
MorseDash();
delay(100);
break;
case 'y':
MorseDash();
delay(100);
MorseDot();
delay(100);
MorseDash();
delay(100);
MorseDash();
delay(100);
break;
case 'z':
MorseDash();
delay(100);
MorseDash();
delay(100);
MorseDot();
delay(100);
MorseDot();
delay(100);
break;
default:
break;
}
}